数据空间研究中心最近在社交机器人研究领域发布了一项重要研究成果。该研究尝试通过拟真社交平台环境,探索社交机器人与检测器的对抗进化过程,从而揭示检测器的漏洞。经过对一百万推特用户的系统分析与大量半仿真实验,所取得的研究成果以论文形式发表于Applied Sciences期刊上。
论文地址:https://www.mdpi.com/2076-3417/15/11/6230
研究背景
社交机器人(social bots)即社交媒体平台上由恶意软件控制的虚假账号,其演化发展使得检测难度日益增加。当前,新型社交机器人通过高度拟人化的行为模式与动态规避策略不断突破传统检测机制的防御。为应对这一挑战,一种可行的解决方案是从对抗性视角出发,预先模拟新型机器人的行为特征并挖掘检测模型的潜在漏洞。然而,现有研究在模拟环境构建和机器人行为仿真方面存在明显局限:一方面,模拟环境缺乏对真实社交媒体动态交互(如用户社交网络结构、影响力扩散模式)的还原;另一方面,机器人行为建模多依赖静态规则或历史数据,未能充分体现新型机器人与检测器之间的动态对抗博弈。这种缺陷导致现有仿真结果难以有效指导实际检测系统的优化升级。因此,如何构建更贴近现实的对抗仿真框架以及机器人行动策略,以探索社交机器人与检测器的竞争机制并揭示检测器的漏洞,成为亟待解决的关键问题。
技术方案
为解决上述问题,研究人员开发了如下框架,分别从环境拟真与机器人进化两方面进行了创新。
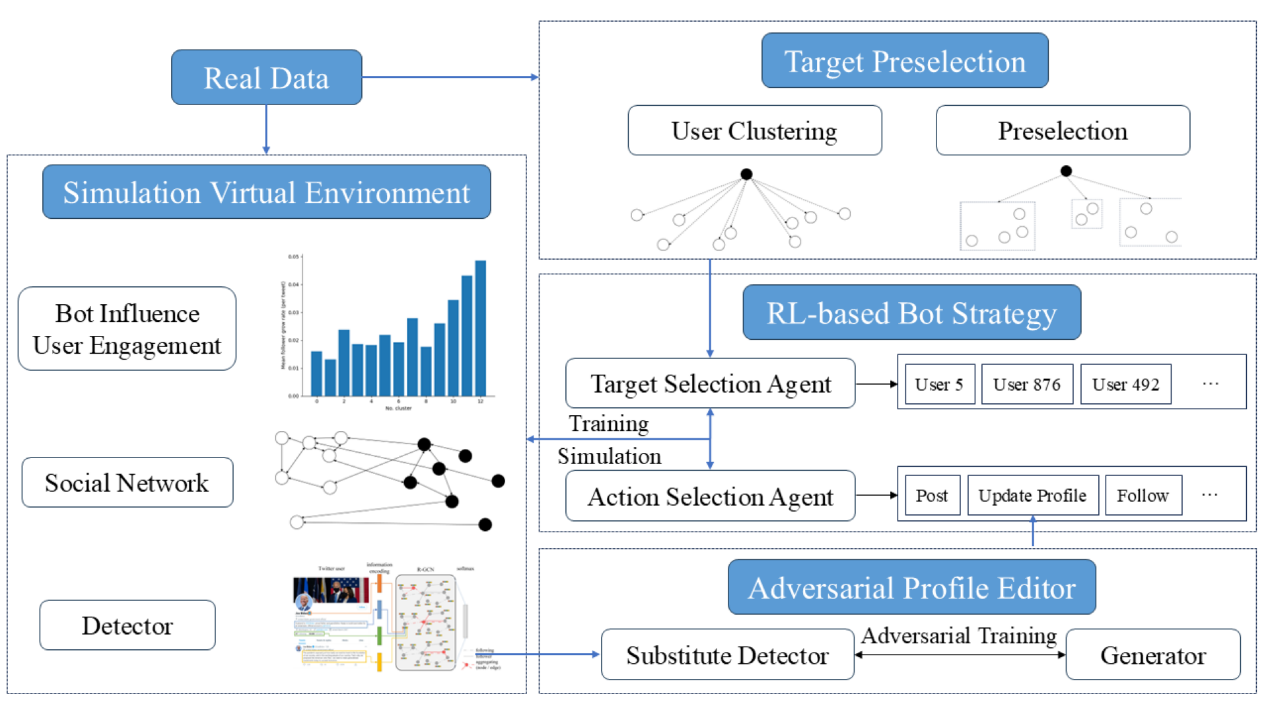
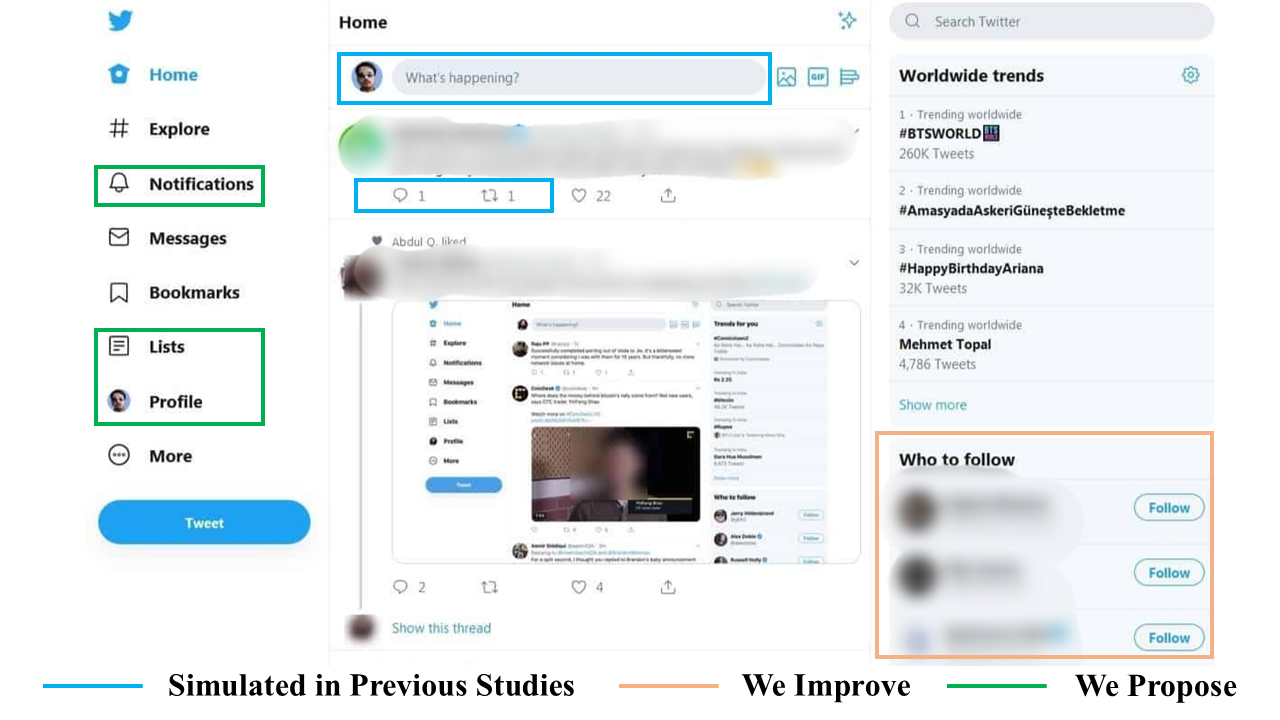
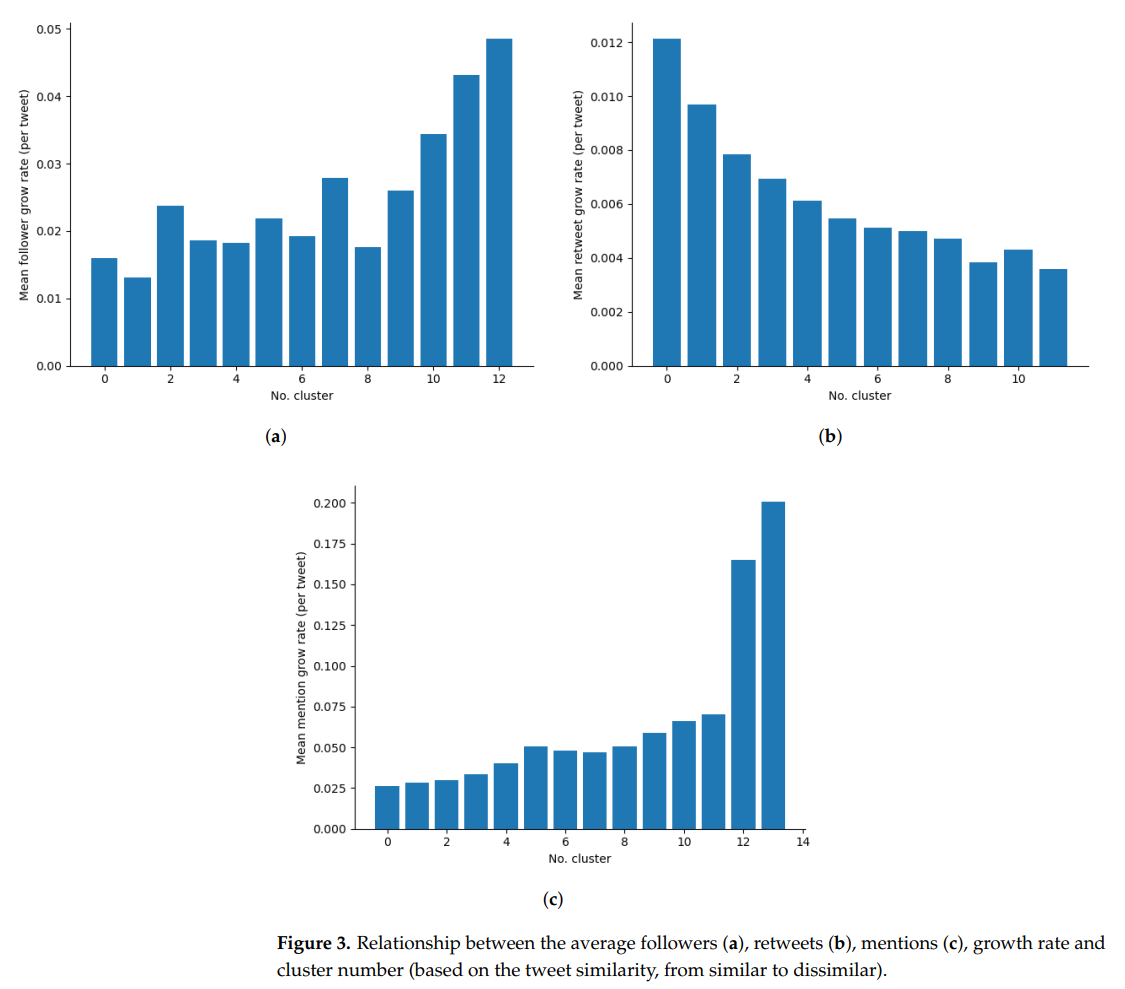
首先基于真实世界数据构建虚拟环境,通过分析社交机器人的影响力与用户参与度,重构动态社交网络。通过对用户生成内容嵌入与粉丝数、转发数、@数增长速率之间的关系进行分析,研究人员基于输入账号与种子账号的用户生成内容相似度构建了更拟真的影响力扩散与用户交互预测模型。
其次,研究人员设计了如下的马尔科夫过程以模拟社交机器人与检测器的对抗过程,其中社交机器人的后续行动由其当前状态sₜ通过行为选择与目标选择智能体共同确定。
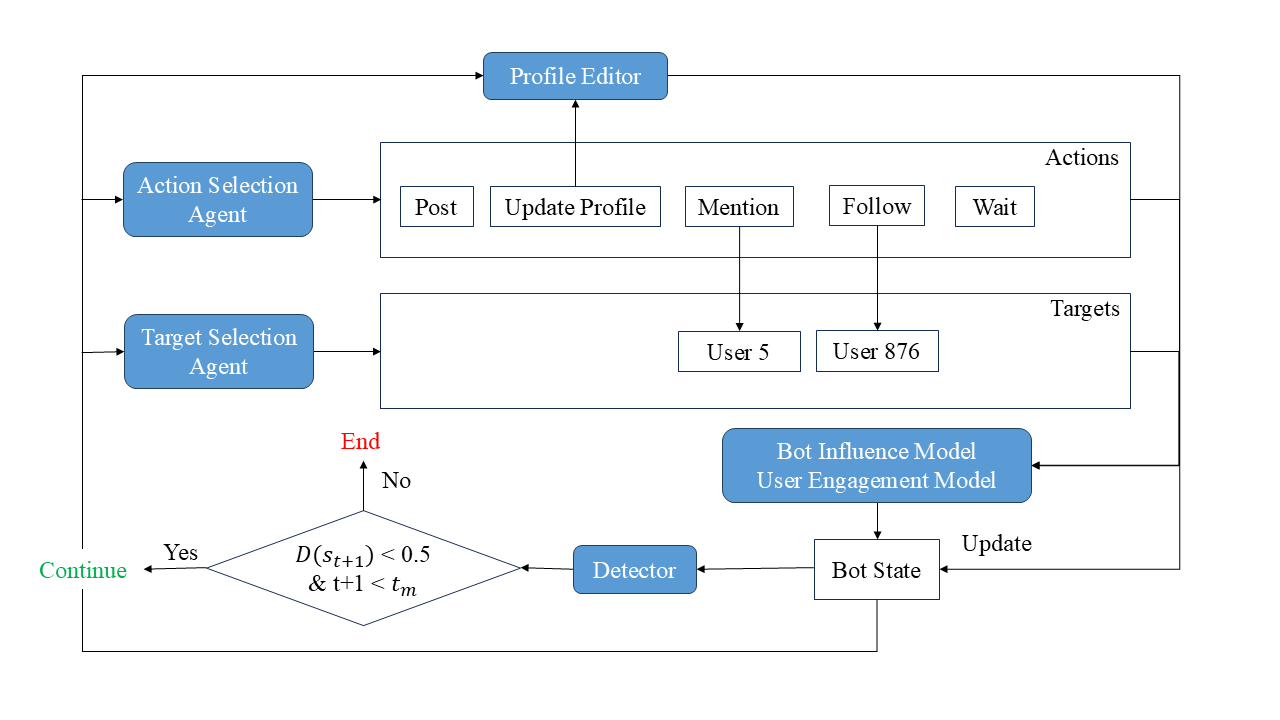
最后,为了模拟现有的高度进化后的社交机器人,研究人员开发了一个集成替代检测器的用户档案编辑器,并以用户聚类进行潜在目标的预筛选以提高其可扩展性。此外,研究人员还通过设计两种不同的奖励函数实现对虚假账号、宣传机器人两种机器人的分别模拟,进一步贴近了现实中的社交机器人。
实验结果
研究人员通过半仿真实验测试了两类社交机器人对抗两种不同检测器(基于传统机器学习的随机森林(RF)检测器以及基于图神经网络(GNN)的深度学习检测器)的对抗结果。
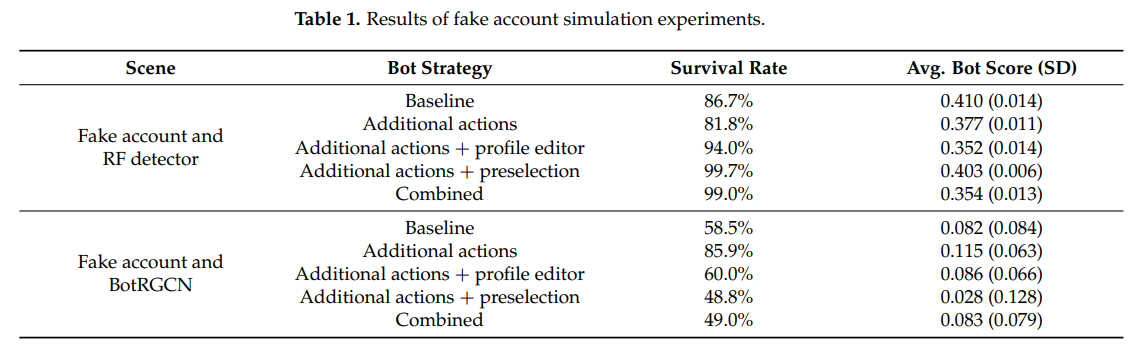
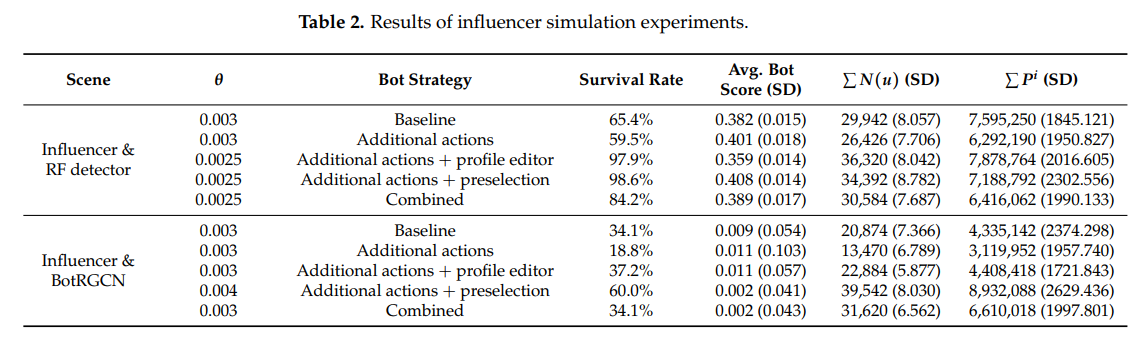
研究结果令人担忧:基于随机森林的检测器既无法有效识别这些社交机器人,也未能阻断其影响力传播。而尽管图神经网络检测器在整体性能上优于RF检测器,但仍有部分机器人能够突破其防御。更重要的是,本研究首次发现:在消融实验中,某些特定类型的社交机器人表现优于通常被认为更先进的类型。这一发现证实了此类”渗透测试”方法能够有效揭示检测系统中的潜在漏洞。